中文
English
400-688-3201
首页
关于我们
服务类型
尺寸测量
三维扫描
产品中心
联系我们
首页
+
关于我们
+
服务类型
+
测量服务
设备租赁
人员外包
培训服务
设备维护
工业测量
+
汽车行业
能源行业
航空航天
钢铁化工
机械加工
隧道动车检测
三维扫描
+
产品中心
+
靶球
靶座
测量辅材
三脚架
探针
吸盘
联系我们
+
公司简介
我们的优势
合作伙伴
公司简介
为度科创检测技术(苏州)有限公司(以下简称:WEDO)是一家专注于先进计量解决方案的提供商,以现代测量技术为核心,结合全球先进测量技术和测量系统,提供合乎乃至超越客户需求的综合性质量控制解决方案,协助其提升产品质量和企业竞争力...
了解更多
测量服务
设备租赁
人员外包
培训服务
设备维护
测量服务
为度检测拥有专业的便携式三坐标测量系统(激光跟踪仪、测量臂、扫描仪、摄影测量系统等)和经验丰富的现场工程师...
了解更多
汽车行业
能源行业
航空航天
钢铁化工
精密检测
隧道动车检测
汽车行业
为度检测拥有专业的便携式三坐标测量系统(激光跟踪仪、测量臂、扫描仪、摄影测量系统等)和经验丰富的现场工程师随着汽车销售量的速度增长,汽车零部件规模比整车还大,这些零部件90%靠模具生产...
了解更多
靶球
靶座
测量辅材
三脚架
探针
吸盘
产品中心
为度检测拥有专业的便携式三坐标测量系统(激光跟踪仪、测量臂、扫描仪、摄影测量系统等)和经验丰富的现场工程师随着汽车销售量的速度增长,汽车零部件规模比整车还大,这些零部件90%靠模具生产...
了解更多
专业团队、持续进步
富有丰富经验的技术团队,可完成各种尺寸测量和数据处理服务。
了解更多+
卓越技术、助力测量
为航空航天等领域提供专业检测服务
了解更多+
合作共赢、成就彼此
缩短产品周期,辅助优化设计
了解更多+
关于我们
ABOUT US
为度科创检测技术(苏州)有限公司(以下简称:WEDO)是一家专注于先进计量解决方案的提供商,以现代测量技术为核心,结合全球先进测量技术和测量系统,提供合乎乃至超越客户需求的综合性质量控制解决方案,协助其提升产品质量和企业竞争力。
查看更多
服务类型
SERVICE ITEMS
测量服务
为度检测拥有专业的便携式三坐标测量系统……
了解更多
设备租赁
为度检测拥有专业的便携式三坐标测量系统……
了解更多
人员外包
为度检测拥有专业的便携式三坐标测量系统……
了解更多
培训服务
为度检测拥有专业的便携式三坐标测量系统……
了解更多
设备维护
为度检测拥有专业的便携式三坐标测量系统……
了解更多
工业测量
INDUSTRIAL MEASUREMENT
汽车行业
能源行业
航空航天
钢铁化工
精密检测
隧道动车检测
产品中心
PRODUCT CENTER
主要销售激光跟踪仪、测量臂以及他们的测量配件、软件等。
0.5英寸靶球手持杆...
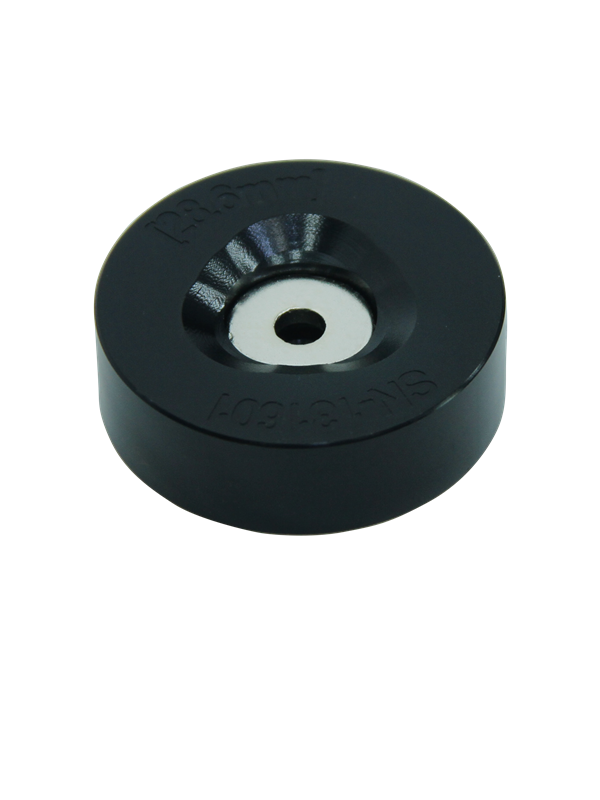
转换靶座
1.5 英寸靶座
蛙跳球
锤电池
电源适配器
增高炮筒
测头
测头
校准锥
高强力磁力吸盘
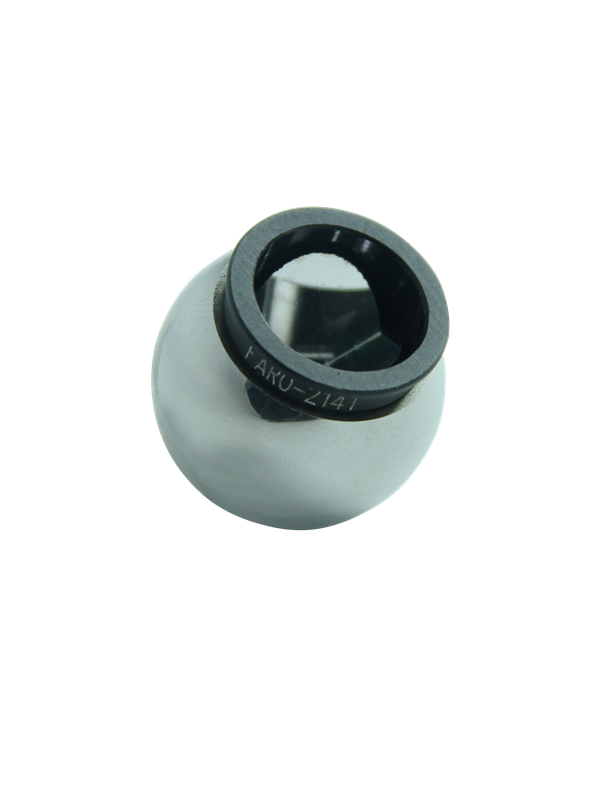
靶球
我司与PMT签订合作伙伴协议
PMT是一家专业从事测量技术并拥有完全自主研发和生产能力的高科技公司。一直以来,PMT遵循欧洲标准进行产品的研发和制造,以其创......
公司新闻
行业资讯
...
我司设立武汉分公司
为更好的服务我国中西部地区,我司在武汉经济开发区特设立武汉分...…
全新打造苏州商务中心
以高标准、宽敞的环境为员工提供更为舒适的办公环境。 ...…
我司与PMT签订合作伙伴协议
PMT是一家专业从事测量技术并拥有完全自主研发和生产能力的高...…
成立成都分公司
为更好的服务我国中西部地区,我司在成都设立分公司。可以更好、...…
案例|管模、管片三维检测方案
三维测量解决方案在盾构法施工中,管片的质量对于整个成型隧道(...…
2016年中国汽车行业发展前景分析
2015年汽车产销量超过2450万辆,创全球历史新高,连续七...…
三坐标测量机日常维护与保养
一、日常维护与保养:1.开机前检查并放掉空压机、过滤器、储气...…
三维扫描仪的测量方法分类
接触式扫描接触式三维扫描仪通过实际触碰物体表面的方式计算深度...…
合作品牌
关于我们
+
公司简介
+
我们的优势
+
合作伙伴
服务类型
+
测量服务
+
设备租赁
+
人员外包
+
培训服务
+
设备维护
尺寸测量
+
汽车行业
+
能源行业
+
航空航天
+
钢铁化工
+
机械加工
+
隧道动车检测
三维扫描
+
扫描检测
+
扫描逆向
+
大空间扫描
产品中心
+
靶球
+
靶座
+
测量辅材
+
三脚架
+
探针
+
吸盘
关于我们
+
公司简介
我们的优势
合作伙伴
服务类型
+
测量服务
设备租赁
人员外包
培训服务
设备维护
工业测量
+
汽车行业
能源行业
航空航天
钢铁化工
精密检测
隧道动车检测
产品中心
+
靶球
靶座
测量辅材
三脚架
探针
吸盘
客服中心
周一至周日 8:00 - 18:00
400-688-3201
Copyright © 2021 为度科创检测技术(苏州)有限公司. All Rights Reserved.
苏ICP备16043145号-1
技术支持:企桥网络